A Bayesian Nash Equilibrium (BNE)-informed ABM for pedestrian evacuation (version 2.0) (2.0.0)
This BNE-informed ABM ultimately aims to provide a more realistic description of complicated pedestrian behaviours especially in high-density and life-threatening situations. Bayesian Nash Equilibrium (BNE) was adopted to reproduce interactive decision-making process among rational and game-playing agents. The implementations of 3 behavioural models, which are Shortest Route (SR) model, Random Follow (RF) model, and BNE model, make it possible to simulate emergent patterns of pedestrian behaviours (e.g. herding and self-organised queuing behaviours, etc.) in emergency situations.
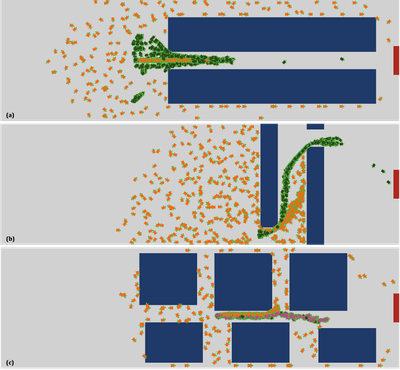
According to the common features of previous mass trampling accidents, a series of simulation experiments were performed in space with 3 types of barriers, which are Horizontal Corridors, Vertical Corridors, and Random Squares, standing for corridors, bottlenecks and intersections respectively, to investigate emergent behaviours of evacuees in varied constricted spatial environments.
Release Notes
This BNE-informed ABM consists of three behavioural models: Shortest Route (SR) model, Random Follow (RF) model, and BNE model, generating four movement combinations: SR, RF, BNE mixed with SR, and BNE mixed with RF, which can be selected by the chooser “moving-pattern”. Several types of barriers (e.g. Narrow Corridors-Horizontal, Narrow Corridors-Vertical, Random Squares, etc.) were implemented to create varied contractive spatial environment. Observers can regulate the initial settings of both agents and simulation environment by the corresponding sliders/choosers.
Associated Publications
Wang, Y., Ge, J. and Comber, A., 2023. Navigation in Complex Space: A Bayesian Nash Equilibrium-Informed Agent-Based Model (Short Paper). In 12th International Conference on Geographic Information Science (GIScience 2023). Schloss Dagstuhl-Leibniz-Zentrum für Informatik. DOI: 10.4230/LIPIcs.GIScience.2023.78
Wang, Y., Ge, J., and Comber, A.: A pedestrian ABM in complex evacuation environments based on Bayesian Nash Equilibrium, AGILE GIScience Ser., 4, 50, https://doi.org/10.5194/agile-giss-4-50-2023, 2023.
Wang, Ying, Ge, Jiaqi, & Comber, Alexis. (2023, April 19). A pedestrian evacuation ABM in a complex environment based on Bayesian Nash Equilibrium. 31st Annual Geographical Information Science Research UK Conference (GISRUK), Glasgow, Scotland. https://doi.org/10.5281/zenodo.7825536
This is a companion discussion topic for the original entry at https://www.comses.net/codebases/e6f64320-2ab4-41ca-a98c-2639254e7b7f/releases/2.0.0